
 Smart cars with automatic sensor driving on metropolis with wireless connection. Foto: kinwun@stock.adobe.com
Smart cars with automatic sensor driving on metropolis with wireless connection. Foto: kinwun@stock.adobe.com
Autonome Fahrzeuge sind auf Deep Neural Networks angewiesen. Sie werden mit Methoden des maschinellen Lernens trainiert, um in beliebigen Fahrsituationen die richtigen Entscheidungen zu treffen. Um das autonome Fahren – am besten weltweit – abzusichern und Trainings- und Wahrnehmungslücken zu identifizieren sind neue Guided Simulation Testverfahren erforderlich.
Mobilitätsdienstleistungen, alternative Antriebe und autonomes Fahren zählen zu den großen Zukunftsthemen in der Automobilindustrie. Der VW-Konzern beispielsweise will bis 2023 fast 44 Milliarden Euro (VW-Vorstand Herbert Diess, 16.11.2018) in neue Mobility Services, Digitalisierung, Elektromobilität und autonomes Fahren investieren. BMW und Daimler arbeiten gemeinsam an Technologien für selbstfahrende Autos. In einer weiteren Kooperation wollen Bosch und Daimler die Entwicklung von Technologien für das autonome Fahren vorantreiben.
Die technischen Voraussetzungen für selbstfahrende Autos, bei denen KI-Algorithmen die unterschiedlichsten Verkehrssituationen in einer klar abgegrenzten Umgebung beherrschen, sind heute schon weitgehend vorhanden. Entscheidend aber für die allgemeine Akzeptanz autonomer Fahrzeuge sind die Zuverlässigkeit und Sicherheit der Machine-Learning (ML)- und Deep-Neural-Network-Algorithmen, die das Auto steuern. Die zentrale Vorgabe für die Fahrzeughersteller lautet daher: Autonomes Fahren muss sicherer sein als der Mensch; die Kriterien dafür sind zum Beispiel die Unfallzahlen und die Zahl der Verkehrstoten im Straßenverkehr.
Damit eine höchstmögliche Sicherheit beim autonomen Fahren erreicht werden kann, müssten Autohersteller und Zulieferer Millionen von Fahrkilometern in Praxistests absolvieren. Dies aber ist zeitlich und ökonomisch nicht umsetzbar. Daher sucht die Automobilbranche nach neuen Verfahren. Sie müssen erstens in der Lage sein, die Daten aus den Testumgebungen zu nutzen und zweitens, intelligente, selbstlernende Systeme parametrierbar zu testen.
Simulations- und Testumgebung zur Absicherung autonomer Autos
Bereits seit einiger Zeit hat CGI einen Investitionsschwerpunkt auf die Entwicklung einer hochkomplexen Testumgebung für „Autonomous Mobility Safeguarding“ gelegt, um statistisch den Nachweis zu erbringen, dass autonomes Fahren besser ist als ein Mensch. Das Ziel dieser End-to-End-Testumgebung, die eine umfangreiche und neue Simulationstechnik beinhaltet, ist es, die zukünftig geforderte Absicherung der Fahrzeuge umfassend zu unterstützen.
Ein zentraler Bestandteil der Simulations- und Real-Life-Testumgebung ist ein umfangreicher Testkatalog für das autonome Fahren. Seit einiger Zeit bauen Fahrzeughersteller und Automobilzulieferer riesige Sensor-Datenbanken im dreistelligen Petabyte-Bereich auf, aus denen KI-Algorithmen von CGI Testdaten extrahieren und automatisierte Tests durchführen können. Auch die Erkenntnisse der Automobilhersteller aus Fahrten auf Teststrecken und die dabei ermittelten Daten fließen in die Simulations- und Real-Life-Testumgebung ein. Der entscheidende Vorteil dieser Vorgehensweise: In der Simulation kann eine größere Menge und Diversität an Szenarien geprüft werden. Wichtig ist dies insbesondere für sogenannte Grenzfälle (Corner Cases), von denen bekannt ist, dass ein autonomes Fahrzeug damit seine Probleme hat oder die einfach zu gefährlich sind, um in der Realität getestet zu werden.
Herausforderungen bei der Absicherung des autonomen Fahrens
Machine-Learning (ML)- und Deep-Neural-Networks (DNN)-basierte Systeme benötigen andere Testansätze als traditionelle Software. Während in der traditionellen Softwarewelt mit einem Testalgorithmus ermittelt wird, ob eine Applikation ein zuvor definiertes Problem löst, reicht dies für die Welt des autonomen Fahrens nicht aus beziehungsweise ist dafür nicht geeignet. Hier besteht die Aufgabe darin, dass neuronale Netze eine bestmögliche Lösung in einer bestimmten Situation selbständig finden müssen – somit der zu testende Algorithmus per se nicht feststeht. Für die Absicherung ist dadurch eine Umstellung von prozeduralen Algorithmentests auf daten- und szenariogestützte Testmethoden mit riesigen Datenmengen aus verschiedenen Sensorsystemen,wie GPS, Lidar, Kamera, Radar und Ultraschall erforderlich.
Um Trainings- und Wahrnehmungslücken der zugrundeliegenden neuro-nalen Netze zu finden, sind Guided-Simulationen erforderlich, die sich auf sehr große Mengen annotierter und klassifizierter Daten aus Testfahr-ten stützen; bei der Annotation werden die Daten um zusätzliche Infor-mationen angereichert, mit denen im Test die Korrektheit der Entschei-dungen des neuronalen Netzwerks überprüft werden kann. Die Autonomous-Mobility-Safeguarding-Umgebung kombiniert ein flexibles, parametrisierbares Testszenario-Design und die Testautomatisierung mit komplexen Big-Data-Analytics-Methoden, um die Testabdeckung und das Testverifikations-Reporting zu gewährleisten.
Daten aus Testfahrzeugen und anderen Datenquellen
In seiner Simulations- und Real-Life-Testumgebung nutzt CGI unter anderem Daten aus den Testfahrzeugen von Autoherstellern. Diese Sammlung enthält unzählige Videosequenzen von realen Testfahrten unter den unterschiedlichsten Fahrbedingungen. Für die Entwicklung der Real-Life-Testumgebung hat CGI die gleiche Open-Source-Datenplattform im Einsatz, an die auch die führenden europäischen Autohersteller wie BMW, Daimler und VW angedockt haben. Der Datensatz der Plattform enthält RGB-Videos mit hochauflösenden Bildern, pixelgenaue Annotation, 3D-Lidar-Punkte mit semantischer Segmentierung, stereoskopische Aufnahmen und Panoramabilder. Mit Hilfe dieser Plattformen erstellt CGI einen Testfallkatalog für das autonome Fahren inklusive realitätsnaher Testdaten.
Autohersteller und Zulieferer können diesen Testkatalog entweder als vorgefertigte Lösung für ihre individuellen und länderspezifischen An-forderungen nutzen oder die Lösung in einer eigenen privaten oder hybriden Cloud-Umgebung installieren. Damit sind sie in der Lage, ihre autonomen Fahrzeuge abzusichern und können diese schneller und sicherer für den weltweiten Einsatz vorbereiten.
Gastbeitrag Von Peter Gitzel, Product Owner Autonomous Driving CGI, in der aktuellen Ausgabe des eMove360°Magazin. Hier kostenlos downloaden.
Schaubilder:
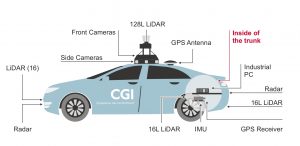
Testwagen von Automobilherstellern sind mit Sensoren und Kameras ausgestattet, die eine umfangreiche Datenmenge erfassen, beispielsweise Fotos und Videosequenzen, GPS, LIDAR zur Abstandsmessung, Radar und Sonar. (Quelle: CGI)
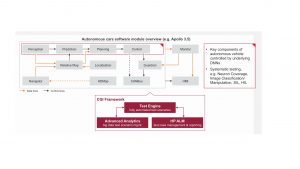
Die Simulations- und Real-Life-Testumgebung von CGI extrahiert aus den Sensor-Datenbanken von Fahrzeugherstellern Testdaten und führt damit automatisierte Tests durch. (Quelle: CGI)

Die Automobilbranche unterscheidet fünf Stufen auf dem Weg zum autonomen Fahrzeug: assistiert, teilautomatisiert, hochautomatisiert, vollautomatisiert, autonom. (Quelle: CGI/Frost & Sullivan)






