
Forscher des KIT wollen den Straßenverkehr sicherer machen, indem sie Straßenbeleuchtung und Autoscheinwerfer insbesondere auch von autonomen Fahrzeugen vernetzen.
Es ist für jeden Autofahrer ein Schreckensszenario: Aus dem dunklen Bereich zwischen zwei Straßenlaternen oder dem Schatten geparkter Autos tritt plötzlich ein Fußgänger auf die Straße, der vorher unsichtbar war. Forscherinnen und Forscher des Karlsruher Instituts für Technologie (KIT) arbeiten an einer Methode, Scheinwerferlicht mit Hilfe von externen Sensoren, die sich etwa am Straßenrand oder auch in anderen Fahrzeugen befinden können, optimal an die jeweiligen Ortsverhältnisse anzupassen.

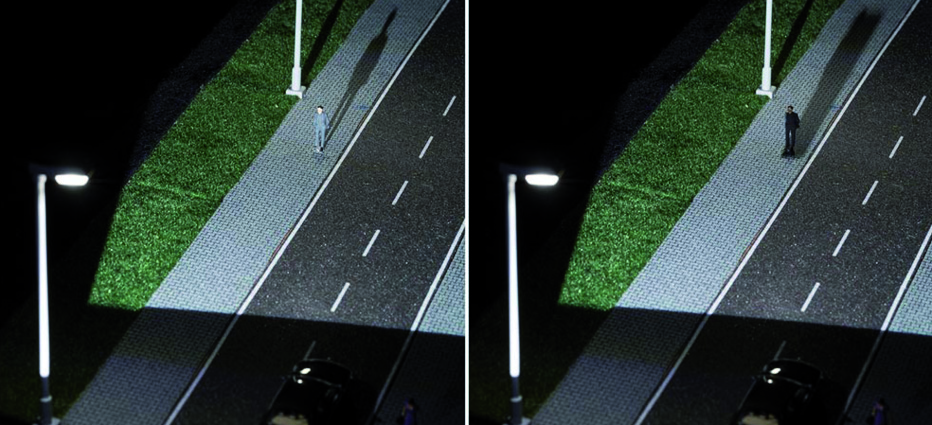
„Camouflage-Effekt“ nennen Experten das Phänomen, welches auftritt, wenn die Lichtverhältnisse den Kontrast zwischen einem Objekt und dessen Umgebung verwischen. Das menschliche Auge kann es dann nicht wahrnehmen. Gleiches gilt für die Kameraaugen autonomer Fahrzeuge.
Als Ausgangspunkt dient den Wissenschaftlerinnen und Wissenschaftlern der vor einigen Jahren am Lichttechnischen Institut des KIT (LTI) entwickelte „Propix“-Scheinwerfer (kurz für Projektor-Pixellicht). Dieser kann seine Lichtverteilung der Umgebung anpassen, also etwa bestimmte Bereiche komplett ausblenden, während andere taghell erleuchtet sind.
Jetzt wollen die Forscher den Propix mit weiteren Sensoren des Fahrzeugs wie Ultraschall, Radar oder Lidar – hier werden statt Radiowellen wie beim Radar Laserstrahlen verwendet – vernetzen. Spüren diese ein Hindernis auf, das sich in einem für Auge oder Kamera blinden Fleck befindet, soll der Schweinwerfer zukünftig selbst reagieren und diesen ausleuchten oder nach Bedarf abblenden. „In der Kombination von ortsfester Straßenbeleuchtung mit variabler Scheinwerferbeleuchtung wird dann optimale Sichtbarkeit erzielt“, sagt Professor Cornelius Neumann, Leiter des LTI.
Die Besonderheit: Die Steuerung des Propix soll nicht nur mit Informationen von Sensoren des eigenen Fahrzeugs gefüttert werden, sondern auch von solchen an Bord anderer Fahrzeuge oder am Straßenrand. „Die Herausforderung besteht insbesondere im Zusammenspiel zwischen den unterschiedlichen Sensoren auf der einen Seite und der Scheinwerfertechnik auf der anderen Seite“, sagt Neumann.
Auf den Menschen übertragen gehe es darum, das Auto mit weiteren Sinnesorganen auszustatten. „Egal, ob wir sehen, dass eine Person auf uns zukommt, oder wir nur ihre Schritte hören, wir erhalten beide Male die gleiche Information: nämlich, dass sich jemand nähert“, erläutert Neumann. „Wenn wir das auch beim Auto schaffen, können wir den Straßenverkehr sicherer machen.“
Ihre neue Technik wollen die Wissenschaftler auf dem im Mai eröffneten Testfeld Autonomes Fahren Baden-Württemberg in Karlsruhe erproben. Das Projekt OpEr (Optimierung der visuellen Erkennbarkeit von Fußgängern auf Basis vernetzter Infrastruktur) gehört damit zu den ersten Forschungsvorhaben, die dort laufen. In diesem Rahmen wird es von der Landesregierung gefördert.
World of eMove360° – Mobilität 4.0: elektrisch, vernetzt, autonom
Fachmesse eMove360°, 16. – 18. Oktober 2018, München, MEHR INFORMATONEN
eMove360° Magazin, erscheint 4mal im Jahr, Verbreitung an 65.000 Empfänger, MEHR INFORMATIONEN
eMove360° Newsletter, wöchentlich in deutsch und englisch, 65.000 Abonnenten, MEHR INFORMATIONEN
eMove360° Mediadaten zum Magazin und Newsletter, MEHR INFORMATIONEN
eMove360° Conferences, 5 Conferences finden parallel zur Fachmesse eMove360° statt, MEHR INFORMATIONEN
eMove360° Award für Elektromobilität und Autonomes Fahren, MEHR INFORMATIONEN
MATERIALICA Design & Technology Award, MEHR INFORMATIONEN
e-Monday Club & Netzwerk für die Mobilität 4.0, MEHR INFORMATIONEN
Industry Directory, Online-Branchenportal für die Mobilität 4.0 mit 5.000 Adressen, MEHR INFORMATIONEN
Shop, MEHR INFORMATIONEN






